Eliminate guesswork
Skip tools open the black box. Run a repeatable, accurate process to calibrate sensors, diagnose errors, and validate your results. And move on.
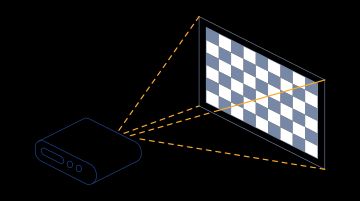

Camera Calibration
Best in class monocular and stereo calibration
We’ve built the industrial calibration tool that lets you focus on your product. Your algorithms need good calibrations; don’t let them down!
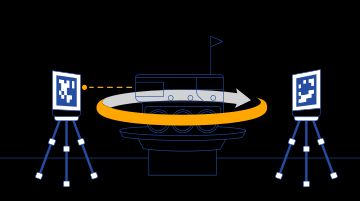

TurniFi Extrinsics
Multi-sensor calibration and groundtruth
Robust fiducial SLAM for repeatable multi-sensor calibration and accurate motion estimation. Custom coordinate frames and kinematic constraints let you model any robot.


Visual Positioning
Accurate pose estimation, no lidar needed
Skip Visual Positioning uses natural structure in the robot’s environment to estimate motion. We develop custom visual localization and positioning solutions using our in-house visual odometry library. Running in realtime, our system supports both stereo and monocular applications.