TurniFi Extrinsics
Flexible multi-sensor extrinsic calibration and motion estimation.
Benefits
- Simple – unified solution replaces many separate calibration steps.
- Transparent – validate, visualize, and debug extrinsics with a single dataset.
- Flexible – reconfigure hardware without re-engineering calibration workflows.
- Fast – pre-map fixed targets for single-frame calibration.
- Precise – use planarity, rotational, and other constraints to improve accuracy.

Multi-arm hand-eye calibration
Calibrate multiple arms and multiple cameras in one step. It doesn't matter if the camera is in the tool frame, the base frame, or somewhere completely different.

No camera overlap needed
TurniFi handles multi-camera extrinsics without overlapping fields of view. Robot-on-a-turntable or pre-mapped calibration targets both supported.

Efficient end-of-line calibration
Optimize your production line with custom calibration workflows:
- Perform single-image calibration with pre-mapped targets.
- Estimate key transforms, including camera-to-axle and axle-to-ground.
- Leverage external cameras to locate key robot features and CAD datums.
- Bootstrap system accuracy by pre-estimating precise target geometry.

Solve for extrinsic calibration
Use case: Extrinsic calibration
For extrinsic calibration, cameras are modeled in the robot coordinate frame. Fiducial markers placed around the workspace act as calibration targets. The TurniFi tool will estimate the camera poses, robot trajectory, and external marker locations.

Use case: Motion estimation
A robot’s motion can be estimated with the TurniFi system using on-board cameras and external targets. Markers can also be placed on the robot itself, with an external camera acting as a localization aid.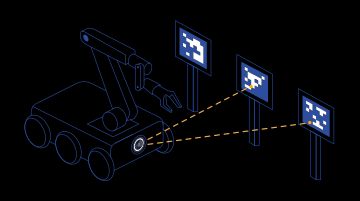
How it works
TurniFi models you robot as a kinematically constrained, differentiable frame graph. It uses camera data to produce pose and motion estimates for the entire transform tree.
Motion capture for robotics
Turn your cameras into precision motion capture instruments for calibration, ground truth, or any application requiring pinpoint positioning.
Flexible Modeling
Custom coordinate frames and kinematic constraints give the flexibility needed to model almost any robot. Robot on a turntable? Modeled. 2D plane constraints? Check. Wobbly suspension? You’re good.
The TurniFi system models constrained relationships between different coordinate frames, enabling:
- Constrained estimation of turntable rotation without encoders.
- Incorporate known pose relationships with fixed frame graph links.
- Fiducials can be constrained to the ground plane.
- Use additional markers to link as-built sensor locations to CAD reference datums.

Scriptable workflow
The Skip TurniFi tool features an end-to-end estimation pipeline with automatic initialization and outlier rejection.
- Define your sensors, coordinate frames, and kinematic constraints.
- Position markers and record a dataset.
- Run the TurniFi tool to get 3D positions and trajectories.
Detailed diagnostics help spot problems so you can iterate and improve performance.
